Flådestyring
Hold styr på din flåde af køretøjer, og optimér offentlig transport
Flådestyringssystemer bruger køretøjssporing i realtid, og lokaliseringsinformation der giver operatørerne mulighed for at optimere udnyttelsen af flåderne, og informere passagererne i realtid, for at forbedre service og overholdelse af tidsplan.
Hvad kan vi gøre for dig?
Offentlige transportoperatører
Vi kan hjælpe offentlige transportoperatøre, der ønsker at forbedre deres service, ved nøjagtigt at spore flådekøretøjer og hurtigt rapportere eventuelle forsinkelser og hændelser.
Vi kan hjælpe byer, der ønsker at forbedre deres offentlig transport services, ved at levere nyttig data i realtid til passagerer og køre offentlig transport effektivt og omkostningseffektivt.
Vi kan hjælpe passagerer, der ønsker at rejse, ved at levere præcise, letforståelige oplysninger i realtid, for at reducere stress og unødig ventetid.
Næste generation af flådestyring
Med SWARCO NEXT
Vi har opgraderet SWARCO NEXT, vores omfattende løsning til flådestyring.
Nu er det endnu mere alsidigt, robust og pålideligt.
Vigtige fordele for vores kunder
Selv-lærende
om ruter
Selvlæring om offentlige transportruter forøger hastigheden betydeligt, og forenkler systemopsætningen for nye kunder
Nyt centralsystem
med moderne komponenter
Integration af
dataanalyser
Reduceret tid / omkostninger, og
forbedret kvalitet
Dette får du med SWARCO NEXT
Dataanalyse, tilpasset rapportering
Ny integration af dataanalyseværktøjer gør det muligt for slutbrugere nemt at oprette tilpassede visninger, betjeningspaneler og rapportering - der viser sammenhængen for de store tilgængelige serier af data, der udarbejdes af systemet til virksomhedsspecifikke forretnings-KPI'er.
Lavere krav til data indenfor datainput
Nye funktioner såsom ruteindlæring reducerer kravene til kvaliteten af datainput, der skal føres ind i systemet. Systemet kan lære ruter ved at anvende maskinindlæringsalgoritmer på de data, der automatisk indsamles af køretøjerne i drift. Denne proces skaber mulighed for at anvende lokalisering af kortsammenligning og konstant forbedre kvaliteten af flådeovervågning.
Forenklet i drift og opsætning
Der er indført væsentlige forbedringer inden for systemkonfigurationsvalidering, system overvågning og fejlfindingssupport for at lette opsætningen og system operationer. Udvidet brug af betjeningspaneler, logsammenhænge og diagnostikværktøjer reducerer de færdigheder, der kræves for at betjene systemet. Nyt værktøj til validering af systemkonfiguration, detaljeret og korrigerende import af data leveret af kunderne er orienteret, for at forbedre tiden til opsætning af systemet og lette fejlfindingen, hvis det er nødvendigt.
Algoritmer for maskinlæring
Udover ruteindlæringsalgoritmerne anvendes andre algoritmer indenfor maskinlæring til selvindlæring af den service, der udføres af køretøjer, og også de handlinger som sendes af afsender i styring af for serviceforstyrrelser, for at vejlede ved omdirigering og service makroregulering.
Forbedret skalerbarhed
Ny softwarearkitektur sikrer et højere niveau af skalerbarhed hvad angår funktionalitet og dimension af den administrerede flåde. Systemet kan konfigureres så man let kan håndtere enkle systemer, der er fokuseret på køretøjer, og til sporing af meget komplekse systemer indenfor driftsstøtte og information om passagerer i realtid.
Hvordan det virker
NEXT Flådestyring er baseret på et centralt system, der er forbundet til software og hardware ombord på bussen.
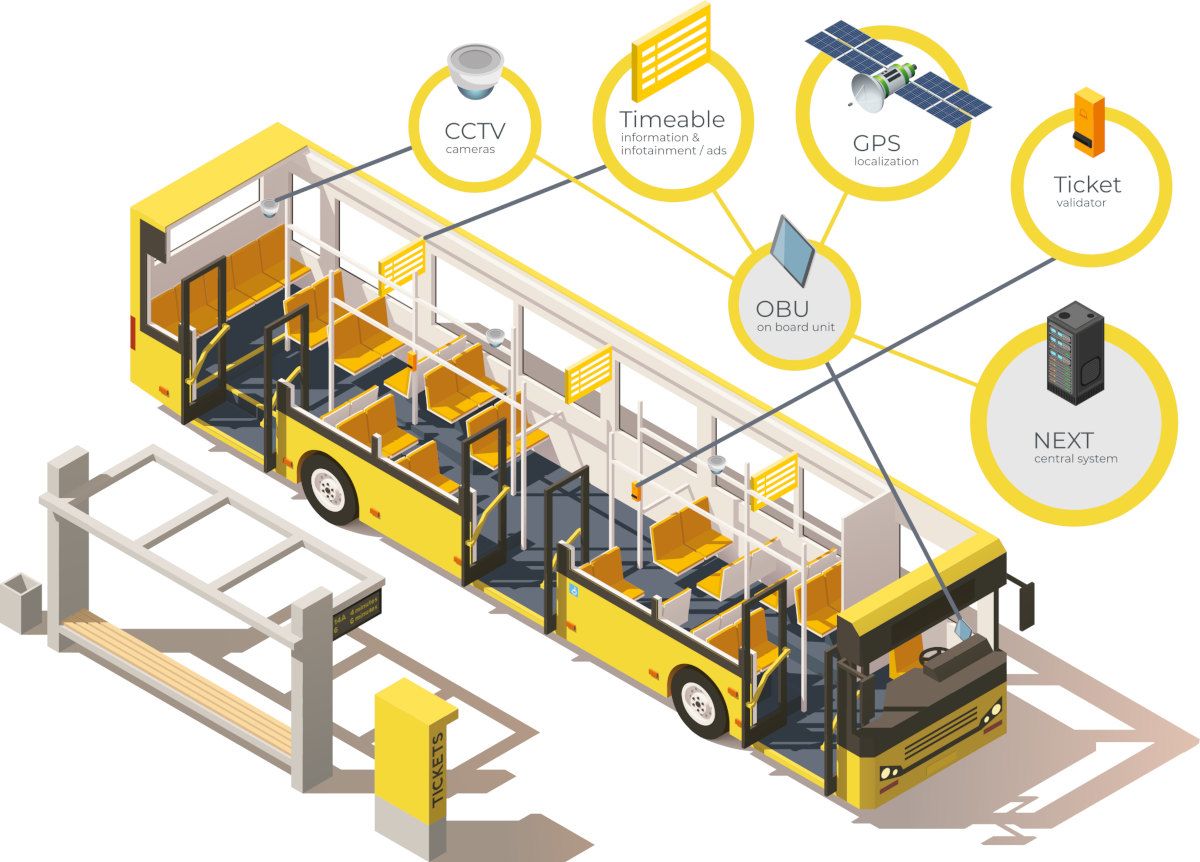
Komponenter
Centralt system
Software ombord
Hardware ombord
Centralt system
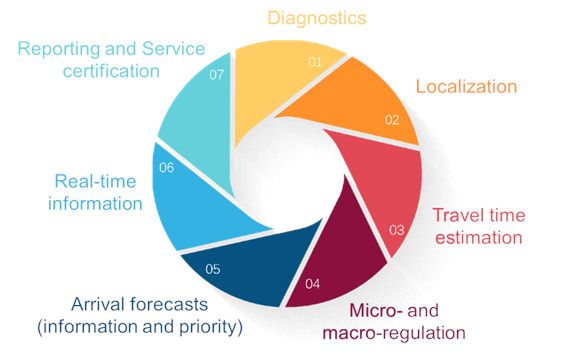
Hovedprocesserne, der drives online på trafikkontrolcentret, kører en efter en i forhold til en kanalstruktur. Sekvensen er primært drevet af real-time informationsstrømme, der stammer fra systemerne ombord på bussen.
Den centrale back-end indsamler alle data fra det telematiske udstyr, gemmer det i en central relationsdatabase og behandler det for at levere en række funktioner. Desuden er det ansvarligt for at sende alle de nødvendige oplysninger og diagnostiske meddelelser til telematikudstyret.
Den logiske sekvens af udarbejdelsesprocesserne er repræsenteret i nedenstående figur:
Software ombord
SW-modulerne, der kører inden for NEXT OBU-enheden, udfører et omfattende sæt af funktioner, herunder:
- Autonom lokalisering ombord, baseret på kortsammenligning
- Brugerflade til fører
- Kørsel af destinationsdisplays, indbyggede skærme og talemeddelelsessystem
- Brugerflade til andet udstyr ombord, som f.eks. CCTV-system, elektronisk billetmaskine, passagertælling, diagnosesystemer, panikknap, dørsensor
- CANBUS-forbindelse (for at hente og indsamle busdiagnostisk status)
- Indsamlingslogik og diagnostisk status for alle de tilsluttede delsystemer
- Kommunikation mod kontrolcenteret og depot-systemet (via Wi-Fi-forbindelse)
Yderligere funktioner
Automatisk tilslutning til mobiloperatøren (2G / 3G / 4G)
Automatisk tilslutning til Wi-Fi-netværk (depotinfrastrukturer)
Konfiguration og indlæsning af servicedata
Identifikation af føreren
Køretøjsidentifikation
Serviceidentifikation
Regulering ombord
Online dataoverførsel
Datalogging og opbevaring (dvs. under manglende kommunikation med centret)
Ekstern parameterkonfiguration til indstilling af datafrekvens og hændelsesdrevet
Håndtering af SMS-beskeder, der sendes fra og til kontrolcenteret: OBU vises til føreren, afsenderens instruktioner, der sendes fra kontrolcenteret, og kan sende til kontrolcenteret forudindstillede meddelelser, der stammer fra førerens handlinger eller ved hjælp af automatiske funktioner.
Hardware ombord
Løsningen er tilpasset systemet ombord, og er designet til let at kunne konfigureres, moduleres og udvides for at muliggøre enhver forøgelse eller udskiftning af enheder ved simpel tilslutning til systemer og sensorer.
Produktets modularitet, forstået som uafhængig af individuelle komponenter, understøtter vedligeholdelse og enkle indgreb til installation og udskiftning af enkelte komponenter (for eksempel i tilfælde af fejl kan den enkelt defekte del udskiftes).
Alle enheder er beskyttet mod overstrøm og / eller overspænding, der kan opstå i strømnettet eller kredsløbet. Placering af ledninger og komponenter sker på en sådan måde, at de ikke påvirkes af og / eller skaber nogen form for interferens af elektromagnetisk natur, termisk eller anden form for forstyrrelser. Hele systemet er fuldt integreret i køretøjet.
De vigtigste egenskaber ved denne løsning er:
Antenner med lav effekt
Modstandsdygtig i forhold til hærværk og sabotage
Modstandsdygtighed over for stød og vibrationer
Modstandsdygtig over for utilsigtet afmontering af forbindelserne
Støddømpende materialebeholdere
Indgange / udgange beskyttet mod polaritetsinversioner og kortslutninger
Fuld overholdelse af alle gældende bestemmelser indenfor strømforsyning
SERVICES
Yderligere services
Rådgivning, planlægning, installation, service og vedligeholdelse.
Vi tilbyder en bred vifte af services for at hjælpe dig i mål med dine projekter. Overlad ansvaret for hele projektet, eller dele af det til os. Vi vil med glæde overtage service og vedligeholdelse.